近日,意昂4平台醫療機器人研究院院長楊廣中教授在Science Advances雜誌上發表研究論文“Liquid seal for compact micropiston actuation at the capillary tip”(DOI: 10.1126/sciadv.aba5660)。
近年來,隨著對靶向治療以及介入治療需求的不斷增長,人們對於開發可用於體內和體外的新型微型工具的興趣不斷增加。亞毫米級導管末端的驅動器可進行組織活檢和操作🍥,或通過有源微光學🍜,來完善細胞尺度的體內介入治療🚣🏿,但這種尺度上的摩擦力在傳統裝置上會產生問題,因此亟需針對需求進行改進與提高🏋️♂️。
為了提供數百微米規模的驅動力🧘♂️,該論文提出了氣動驅動力和表面張力的組合來驅動活塞,該微型活塞連接到直徑為140 μm的毛細血管末端,采用滴油法將活塞和氣缸密封隔開😘,以防止185 mbar壓強差以下的任何泄漏,同時在運轉部件之間潤滑摩擦🏌️♀️,活塞產生的力在壓力高達130 μN時線性增加👨🏽✈️𓀜,且不會破壞液封。此微型活塞最大直徑為150 μm,通過雙光子打印製備而成🧓🏻📪,實驗證明這種微型活塞結合微型夾具(如圖1所示),可抓握🛝、移動並釋放50 μm微球 (如圖2 所示)。此項研究為微米級導管驅動開辟了嶄新的道路🧞♂️。
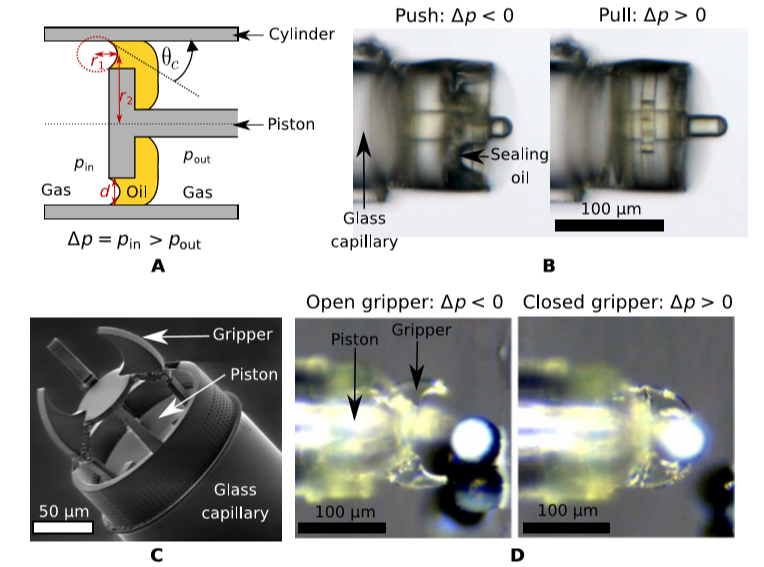
圖1 微型活塞的工作原理以及微型活塞與微型夾具集成的顯微鏡圖與掃描電子顯微鏡圖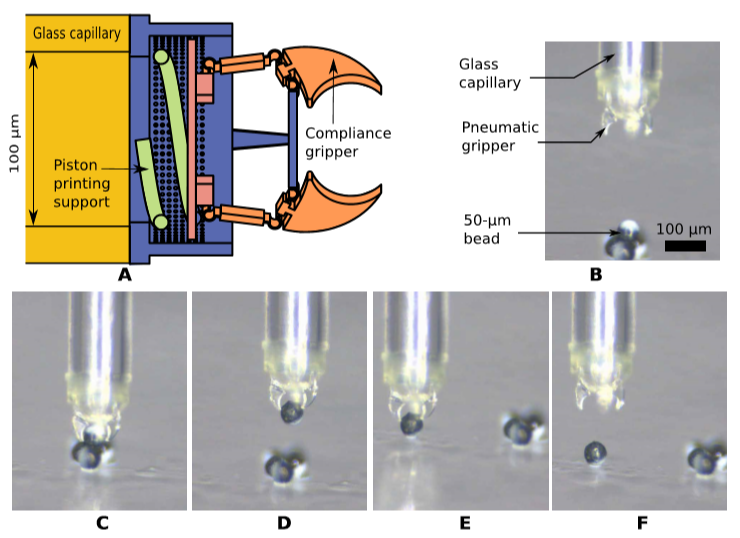
圖2基於微型活塞的微型夾具實現對50 μm微球的抓握、移動與釋放
論文鏈接:https://advances.sciencemag.org/content/6/22/eaba5660
供稿單位🦺:醫療機器人研究院
作者🎻:鄔崇朝👩⚖️,顧運,張悅









