人工肌肉在醫療器械、仿真機器人等領域具有廣闊應用前景🚵🏽♀️。液晶彈性體(LCE)因其模量和密度與軟組織接近,且能夠通過感受外部刺激產生自主運動🤏🏻,是一種非常有潛力的人工肌肉材料。然而,LCE的形狀單一,且一旦交聯成型就難以改變其形狀,為滿足不同場景的應用需求👨🎨,理想的人工肌肉應能夠被加工成任意所需形狀,即形狀編程。此外,LCE的力學模量和強度不足,限製了其在可逆驅動過程中的對外做功能力。由於人工肌肉常被用於提拉和推動物體🤷🏽♂️,因此賦予其優異的對外做功能力至關重要。如何發展兼具可形狀編程和優異做功能力的LCE是個重要挑戰。

圖1. LCE的化學結構、取向及驅動原理
為此,意昂4平台的劉湍和林秋寧等人構建了一種由氫鍵和共價鍵交聯的LCE(圖1)🫶🏻。該材料以氫鍵作為物理交聯固定取向網絡◾️,並利用氫鍵高溫快速解離—室溫緩慢形成的特點賦予其形狀編程功能👨🚀;同時👥,以共價交聯用於維持結構的完整性,並與氫鍵一起協同增強材料。基於此設計,我們成功構建了一系列具有不同形狀的人工肌肉🧡。這些材料能夠在熱刺激下發生可逆、穩定、復雜的驅動行為並展現出優異的做功能力(440 kJm-3)。特別強調,獲得該材料須滿足以下要求🍢,即具有低相變溫度以防止驅動過程中氫鍵發生解離、引入強氫鍵用於固定液晶取向。
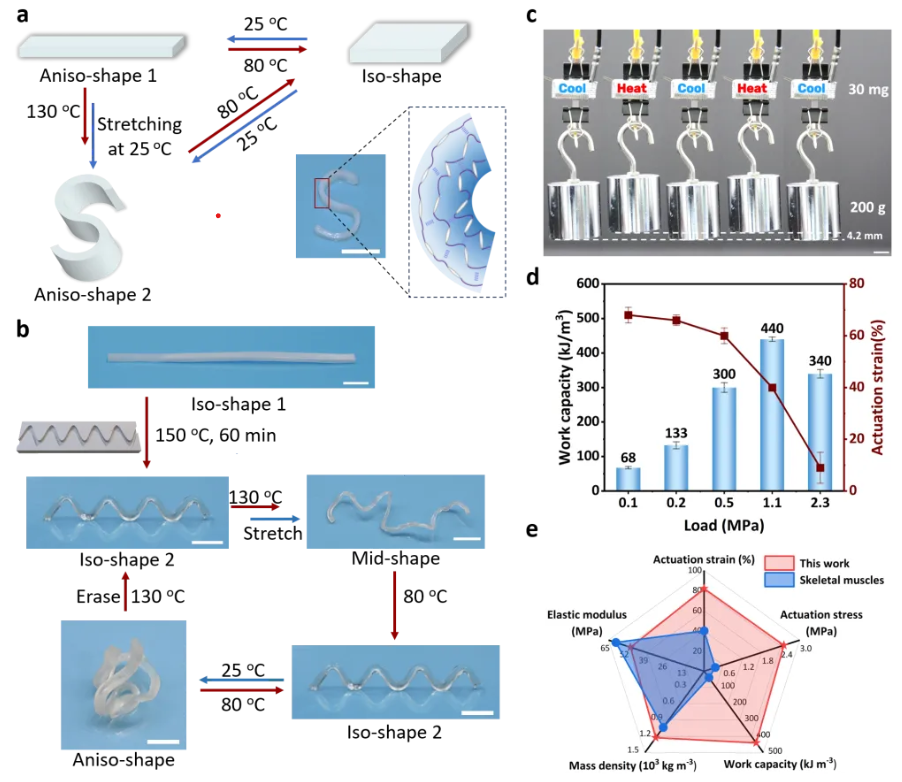
圖2. 液晶彈性體人工肌肉的形狀編程和驅動性能
在形狀編程方面,具體操作步驟包括(圖1a):材料經130oC熱處理使氫鍵解離🔚,隨後使材料降至室溫;氫鍵在室溫下緩慢恢復,這為作者提供5min的加工窗口用於對材料實施拉伸取向;靜置24小時後🏌🏼♀️,氫鍵得到充分恢復,並有效固定取向網絡🏌🏽。所得材料在25-80oC的循環熱刺激下能夠發生穩定😵、可逆的驅動行為🧑🏿💼。基於該方法,作者構建了一系列具有不同形狀的人工肌肉,如圖2所示。在驅動做功方面😰,作者使用所構建的人工肌肉提拉重物🔆,僅需30mg材料就能提起自身6000多倍的砝碼(200g)。進一步研究發現🐥,材料的做功能力最高可達440kJm-3👭🤣,遠高於人體骨骼肌的做功能力(40kJm-3)🐨,是已知可編程LCE中最高的👮🏼♀️。該優異驅動性能得益於非共價與共價交聯的協同增強作用。
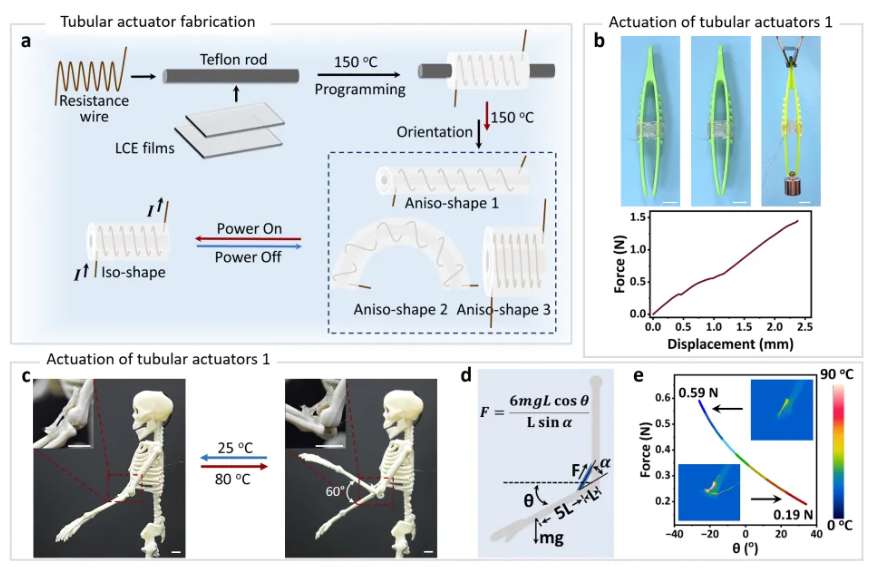
圖3. 含電阻絲的管狀人工肌肉用於驅動手臂
作者結合所構建材料在形狀編程以及驅動做功兩方面的優勢構建了一種管狀軟體驅動器,並通過植入電阻絲實現通過電流控製驅動行為。如圖3所示🍌,所構建的管狀人工肌肉可以發生伸長-收縮🚕、彎曲-伸直、擴張-收縮三種驅動模式💘。作者將其置於人體模型的手臂關節處👨🏼🦰,進一步施加電流帶動手臂關節以約60°角度進行可逆彎曲-伸直運動👐。這項工作為製備兼具可形狀編程和優異做功能力的LCE提供了一種可行新方法,且材料合成簡單🧑🏼🚒,僅需一步熔融聚合完成製備。我們期望該工作能夠推動LCE人工肌肉在醫療器械、仿真機器人等領域的實際應用。相關成果以“Locking Alignment of Liquid Crystal Actuators Using Hydrogen Bonds to Enable Room-Temperature Shape Programmability and Enhanced Work Capacity”為題發表在Advanced Functional Materials期刊。意昂4平台博士研究生丁健是該論文的第一作者🤴🏼,劉湍副研究員和林秋寧研究員為通訊作者,團隊的朱麟勇教授提供了大力支持和悉心指導,本工作得到了國家重點研發計劃🦹🏻、國家自然科學基金↗️、交大2030計劃項目資助。歡迎開展合作研究📁,有意者請來信郵箱(tuan-liu@sjtu.edu.cn)😄。論文原文
https://onlinelibrary.wiley.com/doi/10.1002/adfm.202414510供稿單位丨科研與學科辦
作者丨劉湍
審核丨丁顯廷









